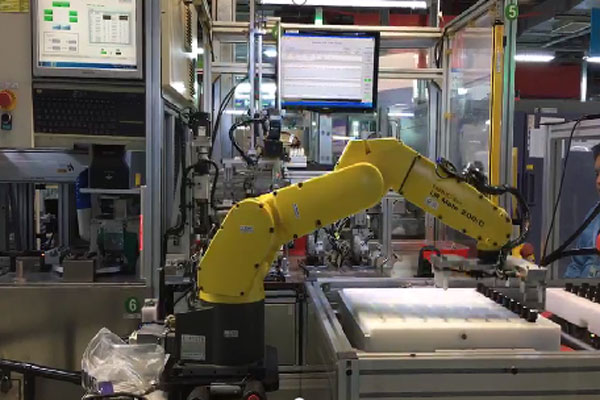
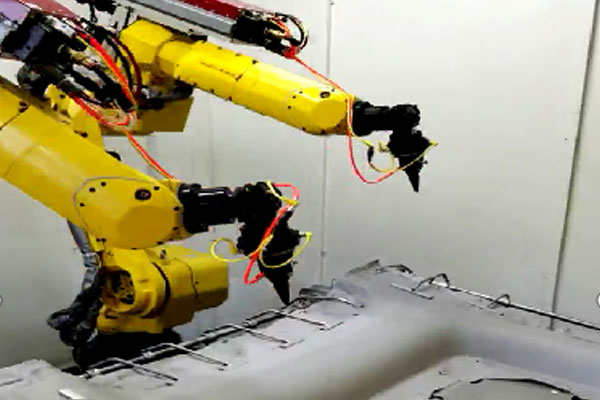
本項目為四套機器人焊接工作站及一套機器人搬運系統。
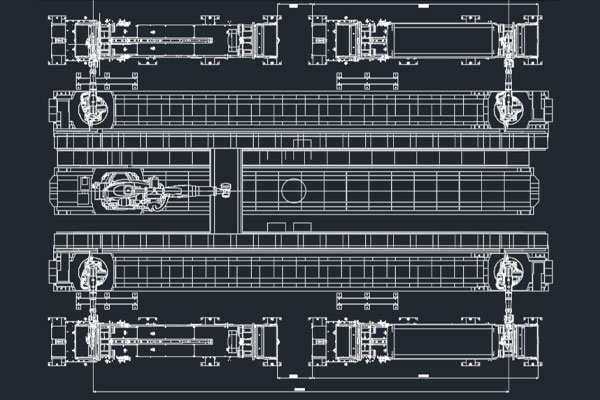
變位機采用頭尾架式,其中尾架可前后移動。在尾架移動地軌上有油箱頂升托舉裝置協助上下料。焊接機器人放置在地軌上,可以移動焊接油箱兩個端面。中間配置搬運機器人實現成品和半成品的上下料。